|
HG-MD
1
|
|
HG-MD
1
|
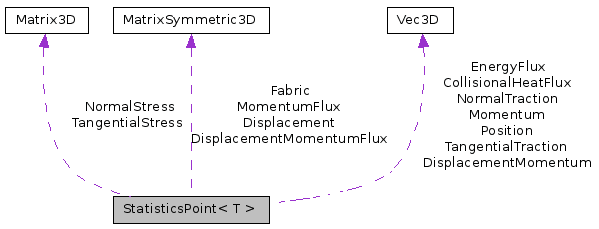
This class stores statistical values for a given spatial position; to be used in combination with StatisticsVector. More...
#include <StatisticsPoint.h>
Public Member Functions | |
| StatisticsPoint () | |
| Constructor sets sensible values. | |
| StatisticsPoint (const StatisticsPoint &other) | |
| Copy constructor; simply copies everything. | |
| void | set_CG_type (const char *CG_type) |
| see StatisticsVector::set_CG_type | |
| CG | get_CG_type () const |
| see StatisticsVector::get_CG_type | |
| void | set_w2 (Mdouble new_) |
| see StatisticsVector::set_w2 | |
| Mdouble | get_w2 () const |
| see StatisticsVector::get_w2 | |
| Mdouble | get_w () const |
| see StatisticsVector::get_w | |
| Mdouble | get_cutoff () |
| see StatisticsVector::get_cutoff | |
| Mdouble | get_cutoff2 () |
| see StatisticsVector::get_cutoff2 | |
| Mdouble | get_xmaxStat () |
| see StatisticsVector::get_xmaxStat | |
| Mdouble | get_ymaxStat () |
| see StatisticsVector::get_ymaxStat | |
| Mdouble | get_zmaxStat () |
| see StatisticsVector::get_zmaxStat | |
| Mdouble | get_xminStat () |
| see StatisticsVector::get_xminStat | |
| Mdouble | get_yminStat () |
| see StatisticsVector::get_yminStat | |
| Mdouble | get_zminStat () |
| see StatisticsVector::get_zminStat | |
| void | get_n (int &nx_, int &ny_, int &nz_) |
| see StatisticsVector::get_n | |
| Mdouble | evaluatePolynomial (Mdouble r) |
| see StatisticsVector::evaluatePolynomial | |
| Mdouble | evaluateIntegral (Mdouble n1, Mdouble n2, Mdouble t) |
| see StatisticsVector::evaluateIntegral | |
| void | set_CG_invvolume () |
| sets CG_invvolume | |
| Mdouble | get_CG_invvolume () |
| returns CG_invvolume | |
| void | set_Gaussian_invvolume (int dim) |
| sets CG_invvolume if CG_type=Gaussian | |
| void | set_Heaviside_invvolume () |
| sets CG_invvolume if CG_type=HeaviSideSphere | |
| void | set_Polynomial_invvolume (int dim) |
| sets CG_invvolume if CG_type=Polynomial | |
| void | set_Position (Vec3D new_) |
| sets Position | |
| Vec3D | get_Position () const |
| returns Position | |
| void | set_zero () |
| Sets all statistical variables to zero. | |
| StatisticsPoint< T > | getSquared () |
| Squares all statistical variables; needed for variance. | |
| StatisticsPoint< T > & | operator= (const StatisticsPoint< T > &P) |
| Defines a equal operator needed for copy constructor. | |
| StatisticsPoint< T > & | operator+= (const StatisticsPoint< T > &P) |
Defines a plus operator needed to average values (  ) ) | |
| StatisticsPoint< T > & | operator-= (const StatisticsPoint< T > &P) |
| Defines a plus operator needed to calculate variance. | |
| StatisticsPoint< T > & | operator/= (const Mdouble a) |
| Defines a division operator needed to average values ( ) | |
| void | timeAverage (const int n) |
| Defines a division operator needed to time-average values (because the displacement does not have a value at the first timestep, this is slightly different than /=) | |
| Mdouble | get_distance2 (Vec3D &P) |
| returns the coarse graining distance in the coordinates that are not averaged about | |
| Mdouble | dot (Vec3D &P, Vec3D &Q) |
| Returns the dot product of two vectors in the coordinates that are not averaged about. | |
| Mdouble | CG_function (Vec3D &PI) |
| Returns the value of the course graining function phi(P,PI) | |
| Mdouble | CG_function_2D (Vec3D &PI) |
| returns the value of the course graining function phi(P,PI) averaged along a line | |
| Mdouble | CG_function_1D (Vec3D &PI) |
| Returns the value of the course graining function phi(P,PI) averaged along a plane. | |
| Vec3D | CG_gradient (Vec3D &P, Mdouble phi) |
| gradient of phi | |
| Vec3D | CG_integral_gradient (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal) |
| gradient of phi | |
| Mdouble | CG_integral (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal, Mdouble P1_P2_distance) |
Returns the value of the coarse graining integral  . . | |
| Mdouble | CG_integral_2D (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal, Mdouble P1_P2_distance) |
| Returns the value of the coarse graining integral averaged along a line. | |
| Mdouble | CG_integral_3D (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal, Mdouble P1_P2_distance) |
| Mdouble | CG_integral_1D (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal, Mdouble P1_P2_distance) |
| Returns the value of the coarse graining integral averaged along a plane. | |
| string | print () const |
| Outputs statistical variables in human-readable format. | |
| string | print_sqrt () const |
| Outputs root of statistical variables in human-readable format. | |
| string | write_variable_names () |
| Outputs names of statistical variables in computer-readable format. | |
| string | write () const |
| Outputs statistical variables in computer-readable format. | |
| template<> | |
| void | set_CG_invvolume () |
| template<> | |
| void | set_CG_invvolume () |
| template<> | |
| void | set_CG_invvolume () |
| template<> | |
| void | set_CG_invvolume () |
| template<> | |
| void | set_CG_invvolume () |
| template<> | |
| void | set_CG_invvolume () |
| template<> | |
| void | set_CG_invvolume () |
| template<> | |
| void | set_CG_invvolume () |
| template<> | |
| Mdouble | CG_function (Vec3D &PI) |
| template<> | |
| Mdouble | CG_function (Vec3D &PI) |
| template<> | |
| Mdouble | CG_function (Vec3D &PI) |
| template<> | |
| Mdouble | CG_function (Vec3D &PI) |
| template<> | |
| Mdouble | CG_function (Vec3D &PI) |
| template<> | |
| Mdouble | CG_function (Vec3D &PI) |
| template<> | |
| double | CG_function (Vec3D &) |
| template<> | |
| Vec3D | CG_gradient (Vec3D &P, Mdouble phi) |
| template<> | |
| Vec3D | CG_gradient (Vec3D &P, Mdouble phi) |
| template<> | |
| Vec3D | CG_gradient (Vec3D &P, Mdouble phi) |
| template<> | |
| Vec3D | CG_gradient (Vec3D &P, Mdouble phi) |
| template<> | |
| Vec3D | CG_gradient (Vec3D &P, Mdouble phi) |
| template<> | |
| Vec3D | CG_gradient (Vec3D &P, Mdouble phi) |
| template<> | |
| Vec3D | CG_gradient (Vec3D &, double) |
| template<> | |
| Mdouble | CG_integral (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal, Mdouble P1_P2_distance) |
| template<> | |
| Mdouble | CG_integral (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal, Mdouble P1_P2_distance) |
| template<> | |
| Mdouble | CG_integral (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal, Mdouble P1_P2_distance) |
| template<> | |
| Mdouble | CG_integral (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal, Mdouble P1_P2_distance) |
| template<> | |
| Mdouble | CG_integral (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal, Mdouble P1_P2_distance) |
| template<> | |
| Mdouble | CG_integral (Vec3D &P1, Vec3D &P2, Vec3D &P1_P2_normal, Mdouble P1_P2_distance) |
| template<> | |
| double | CG_integral (Vec3D &, Vec3D &, Vec3D &, double) |
| template<> | |
| Mdouble | get_distance2 (Vec3D &P) |
| template<> | |
| Mdouble | get_distance2 (Vec3D &P) |
| template<> | |
| Mdouble | get_distance2 (Vec3D &P) |
| template<> | |
| Mdouble | get_distance2 (Vec3D &P) |
| template<> | |
| Mdouble | get_distance2 (Vec3D &P) |
| template<> | |
| Mdouble | get_distance2 (Vec3D &P) |
| template<> | |
| double | get_distance2 (Vec3D &) |
| template<> | |
| Mdouble | dot (Vec3D &P, Vec3D &Q) |
| template<> | |
| Mdouble | dot (Vec3D &P, Vec3D &Q) |
| template<> | |
| Mdouble | dot (Vec3D &P, Vec3D &Q) |
| template<> | |
| Mdouble | dot (Vec3D &P, Vec3D &Q) |
| template<> | |
| Mdouble | dot (Vec3D &P, Vec3D &Q) |
| template<> | |
| Mdouble | dot (Vec3D &P, Vec3D &Q) |
| template<> | |
| double | dot (Vec3D &, Vec3D &) |
Static Public Member Functions | |
| static void | set_gb (StatisticsVector< T > *new_gb) |
| see StatisticsVector::set_CG_type | |
Public Attributes | |
| Mdouble | Nu |
Particle volume fraction,  . . | |
| Mdouble | Density |
Density,  . . | |
| Vec3D | Momentum |
Momentum,  . . | |
| Vec3D | DisplacementMomentum |
Momentum from linear displacement,  . . | |
| MatrixSymmetric3D | Displacement |
Linear displacement,  . . | |
| MatrixSymmetric3D | MomentumFlux |
Momentum flux,  . . | |
| MatrixSymmetric3D | DisplacementMomentumFlux |
Momentum flux from linear displacement,  . . | |
| Vec3D | EnergyFlux |
Energy flux,  . . | |
| Matrix3D | NormalStress |
Stress from normal forces,  . . | |
| Matrix3D | TangentialStress |
Stress from tangential forces,  . . | |
| Vec3D | NormalTraction |
Traction from normal forces,  . . | |
| Vec3D | TangentialTraction |
Traction from tangential forces,  . . | |
| MatrixSymmetric3D | Fabric |
Fabric tensor,  . . | |
| Vec3D | CollisionalHeatFlux |
Heat flux from collisions,  . . | |
| Mdouble | Dissipation |
Dissipation form collisions,  . . | |
| Mdouble | Potential |
Elastic energy  . . | |
| Mdouble | CG_invvolume |
| Prefactor of CG function which depends on $w. | |
| int | mirrorParticle |
| indicates that a position is a (fake) particles used for periodic walls | |
Private Attributes | |
| Vec3D | Position |
| Position at which evaluation occurs. | |
Static Private Attributes | |
| static StatisticsVector< T > * | gb |
| Pointer to StatisticsVector (to obtain global parameters) | |
Friends | |
| std::ostream & | operator (std::ostream &os, const StatisticsPoint< T > &stat) |
| Outputs statistical variables to ostream. | |
This class stores statistical values for a given spatial position; to be used in combination with StatisticsVector.
| StatisticsPoint< T >::StatisticsPoint | ( | ) | [inline] |
Constructor sets sensible values.
References StatisticsPoint< T >::mirrorParticle, StatisticsPoint< T >::Position, and Vec3D::set_zero().
{
this->Position.set_zero();
mirrorParticle=-1;
//~ this->set_zero();
}
| StatisticsPoint< T >::StatisticsPoint | ( | const StatisticsPoint< T > & | other | ) | [inline] |
Copy constructor; simply copies everything.
References StatisticsPoint< T >::mirrorParticle.
{*this = other; mirrorParticle=-1;}
| Mdouble StatisticsPoint< T >::CG_function | ( | Vec3D & | PI | ) |
Returns the value of the course graining function phi(P,PI)
References Gaussian, HeavisideSphere, and polynomial.
{
Mdouble dist2 = get_distance2(PI);
if (get_CG_type()==HeavisideSphere) {
return (get_w2()<dist2)?0.0:get_CG_invvolume();
} else if (get_CG_type()==Gaussian) {
return (get_cutoff2()<dist2)?0.0:get_CG_invvolume() * exp(-dist2/(2.0*get_w2()));
} else if (get_CG_type()==polynomial) {
return (get_cutoff2()<dist2)?0.0:get_CG_invvolume()*evaluatePolynomial(sqrt(dist2)/get_cutoff());
} else { cerr << "error in CG_function" << endl; exit(-1); }
}
| Mdouble StatisticsPoint< XY >::CG_function | ( | Vec3D & | PI | ) |
{
return CG_function_2D(PI);
}
| Mdouble StatisticsPoint< XZ >::CG_function | ( | Vec3D & | PI | ) |
{
return CG_function_2D(PI);
}
| Mdouble StatisticsPoint< YZ >::CG_function | ( | Vec3D & | PI | ) |
{
return CG_function_2D(PI);
}
| Mdouble StatisticsPoint< X >::CG_function | ( | Vec3D & | PI | ) |
{
return CG_function_1D(PI);
}
| Mdouble StatisticsPoint< Y >::CG_function | ( | Vec3D & | PI | ) |
{
return CG_function_1D(PI);
}
| Mdouble StatisticsPoint< Z >::CG_function | ( | Vec3D & | PI | ) |
{
return CG_function_1D(PI);
}
| double StatisticsPoint< O >::CG_function | ( | Vec3D & | ) |
{
return get_CG_invvolume();
}
| Mdouble StatisticsPoint< T >::CG_function_1D | ( | Vec3D & | PI | ) |
Returns the value of the course graining function phi(P,PI) averaged along a plane.
References Gaussian, HeavisideSphere, constants::pi, and polynomial.
{
Mdouble dist2 = get_distance2(PI);
if (get_CG_type()==HeavisideSphere) {
return (get_w2()<dist2)?0.0:(get_CG_invvolume()*constants::pi*(get_w2()-dist2));
} else if (get_CG_type()==Gaussian) {
return (get_cutoff2()<dist2)?0.0:get_CG_invvolume() * exp(-dist2/(2.0*get_w2()));
} else if (get_CG_type()==polynomial) {
return (get_cutoff2()<dist2)?0.0:get_CG_invvolume()*evaluatePolynomial(sqrt(dist2)/get_cutoff());
} else { cerr << "error in CG_function_1D" << endl; exit(-1); }
}
| Mdouble StatisticsPoint< T >::CG_function_2D | ( | Vec3D & | PI | ) |
returns the value of the course graining function phi(P,PI) averaged along a line
References Gaussian, HeavisideSphere, and polynomial.
{
Mdouble dist2 = get_distance2(PI);
if (get_CG_type()==HeavisideSphere) {
if (get_w2()<dist2) return 0.0;
else {
Mdouble wn = sqrt(get_w2()-dist2);
return get_CG_invvolume()*2.0*wn;
//return get_CG_invvolume()*(min(wn,gb->getBoundaryDistanceLeft()) +min(wn,gb->getBoundaryDistanceRight()));
}
} else if (get_CG_type()==Gaussian) {
return (get_cutoff2()<dist2)?0.0:get_CG_invvolume() * exp(-dist2/(2.0*get_w2()));
} else if (get_CG_type()==polynomial) {
return (get_cutoff2()<dist2)?0.0:get_CG_invvolume()*evaluatePolynomial(sqrt(dist2)/get_cutoff());
} else { cerr << "error in CG_function_2D" << endl; exit(-1); }
}
| Vec3D StatisticsPoint< T >::CG_gradient | ( | Vec3D & | P, |
| Mdouble | phi | ||
| ) |
| Vec3D StatisticsPoint< YZ >::CG_gradient | ( | Vec3D & | P, |
| Mdouble | phi | ||
| ) |
| Vec3D StatisticsPoint< XZ >::CG_gradient | ( | Vec3D & | P, |
| Mdouble | phi | ||
| ) |
| Vec3D StatisticsPoint< XY >::CG_gradient | ( | Vec3D & | P, |
| Mdouble | phi | ||
| ) |
| Vec3D StatisticsPoint< X >::CG_gradient | ( | Vec3D & | P, |
| Mdouble | phi | ||
| ) |
| Vec3D StatisticsPoint< Y >::CG_gradient | ( | Vec3D & | P, |
| Mdouble | phi | ||
| ) |
| Vec3D StatisticsPoint< Z >::CG_gradient | ( | Vec3D & | P, |
| Mdouble | phi | ||
| ) |
| Vec3D StatisticsPoint< O >::CG_gradient | ( | Vec3D & | , |
| double | |||
| ) |
{return Vec3D(0.0,0.0,0.0);}
| Mdouble StatisticsPoint< T >::CG_integral | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal, | ||
| Mdouble | P1_P2_distance | ||
| ) |
Returns the value of the coarse graining integral .
References Gaussian, Vec3D::GetLength(), HeavisideSphere, constants::pi, and polynomial.
{
Vec3D P_P1 = Position - P1;
Vec3D P_P2 = Position - P2;
Mdouble a = dot(P_P1,P1_P2_normal);
Mdouble b = dot(P_P2,P1_P2_normal);
Vec3D tangential = P_P1 - a * P1_P2_normal;
if (get_CG_type()==HeavisideSphere) {
Mdouble wn2 = get_w2() - dot(tangential,tangential);
if ((wn2<=0) | (a*abs(a)>=wn2) | (b*abs(b)<=-wn2)) {
return 0;
} else {
Mdouble wn = sqrt(wn2);
return get_CG_invvolume()*( min(b,wn)-max(a,-wn) ) / P1_P2_distance;
}
} else if (get_CG_type()==Gaussian) { //Gaussian
static Mdouble wsq2 = sqrt(2*get_w2());
static Mdouble f = sqrt(2*constants::pi*get_w2());
return get_CG_invvolume() * f * exp(-dot(tangential,tangential)/(2.0*get_w2()))
* (erf(b/wsq2)-erf(a/wsq2))/2/P1_P2_distance;
} else if (get_CG_type()==polynomial) {
double wn2 = get_w2() - dot(tangential,tangential);
if ((wn2<=0) | (a*abs(a)>=wn2) | (b*abs(b)<=-wn2)) {
return 0;
} else {
double wn = sqrt(wn2);
double w = get_w();
return get_CG_invvolume()*evaluateIntegral(max(a,-wn)/w,min(b,wn)/w,tangential.GetLength()/w)*w / P1_P2_distance;
}
//CG_type_todo
} else { cerr << "error in CG_integral" << endl; exit(-1); }
}
| Mdouble StatisticsPoint< XY >::CG_integral | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal, | ||
| Mdouble | P1_P2_distance | ||
| ) |
{
return CG_integral_2D(P1, P2, P1_P2_normal, P1_P2_distance);
}
| Mdouble StatisticsPoint< XZ >::CG_integral | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal, | ||
| Mdouble | P1_P2_distance | ||
| ) |
{
return CG_integral_2D(P1, P2, P1_P2_normal, P1_P2_distance);
}
| Mdouble StatisticsPoint< YZ >::CG_integral | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal, | ||
| Mdouble | P1_P2_distance | ||
| ) |
{
return CG_integral_2D(P1, P2, P1_P2_normal, P1_P2_distance);
}
| Mdouble StatisticsPoint< X >::CG_integral | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal, | ||
| Mdouble | P1_P2_distance | ||
| ) |
{
return CG_integral_1D(P1, P2, P1_P2_normal, P1_P2_distance);
}
| Mdouble StatisticsPoint< Y >::CG_integral | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal, | ||
| Mdouble | P1_P2_distance | ||
| ) |
{
return CG_integral_1D(P1, P2, P1_P2_normal, P1_P2_distance);
}
| Mdouble StatisticsPoint< Z >::CG_integral | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal, | ||
| Mdouble | P1_P2_distance | ||
| ) |
{
return CG_integral_1D(P1, P2, P1_P2_normal, P1_P2_distance);
}
| double StatisticsPoint< O >::CG_integral | ( | Vec3D & | , |
| Vec3D & | , | ||
| Vec3D & | , | ||
| double | |||
| ) |
{
return get_CG_invvolume();
}
| Mdouble StatisticsPoint< T >::CG_integral_1D | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal, | ||
| Mdouble | P1_P2_distance | ||
| ) |
Returns the value of the coarse graining integral averaged along a plane.
References Gaussian, HeavisideSphere, constants::pi, polynomial, and sqr.
{
Vec3D P_P1 = Position - P1;
Vec3D P_P2 = Position - P2;
Mdouble a = dot(P_P1,P1_P2_normal);
Mdouble b = dot(P_P2,P1_P2_normal);
Vec3D tangential = P_P1 - a * P1_P2_normal;
if (get_CG_type()==HeavisideSphere) {
Mdouble wn2 = get_w2() - dot(tangential,tangential);
if ((wn2<=0) | (a*abs(a)>=wn2) | (b*abs(b)<=-wn2)) {
return 0;
} else {
//if the normal is parallel to the averaging direction
if (max(abs(a),abs(b))<1e-20) {
return get_CG_invvolume() * constants::pi * wn2;
}
Mdouble wn = sqrt(wn2);
return get_CG_invvolume() / P1_P2_distance
*( ((b>= wn)?( 2.0/3.0*constants::pi*wn2*wn):(b*constants::pi*(wn2-sqr(b)/3.0)))
-((a<=-wn)?(-2.0/3.0*constants::pi*wn2*wn):(a*constants::pi*(wn2-sqr(a)/3.0))) );
}
} else if (get_CG_type()==Gaussian) { //Gaussian
if (P1_P2_distance<1e-20) {
return get_CG_invvolume() * exp(-dot(P_P1,P_P1)/(2.0*get_w2()));
}
Mdouble wsq2 = sqrt(2*get_w2());
Mdouble f = sqrt(2*constants::pi*get_w2());
return get_CG_invvolume() * f * exp(-dot(tangential,tangential)/(2.0*get_w2()))
* (erf(b/wsq2)-erf(a/wsq2))/2/P1_P2_distance;
} else if (get_CG_type()==polynomial) {
double wn2 = get_w2() - dot(tangential,tangential);
if ((wn2<=0) | (a*abs(a)>=wn2) | (b*abs(b)<=-wn2)) {
return 0;
} else {
double wn = sqrt(wn2);
//if the normal is parallel to the averaging direction
if (max(abs(a),abs(b))<1e-20) {
return get_CG_invvolume() * 2 * wn;
}
double w = get_w();
return get_CG_invvolume()*evaluateIntegral(max(a,-wn)/w,min(b,wn)/w,dot(tangential,tangential)/w)*w / P1_P2_distance;
}
} else { cerr << "error in CG_integral_1D" << endl; exit(-1); }
}
| Mdouble StatisticsPoint< T >::CG_integral_2D | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal, | ||
| Mdouble | P1_P2_distance | ||
| ) |
Returns the value of the coarse graining integral averaged along a line.
References Gaussian, Vec3D::GetLength(), HeavisideSphere, constants::pi, polynomial, and sqr.
{
Vec3D P_P1 = Position - P1;
Vec3D P_P2 = Position - P2;
Mdouble a = dot(P_P1,P1_P2_normal);
Mdouble b = dot(P_P2,P1_P2_normal);
Vec3D tangential = P_P1 - a * P1_P2_normal;
if (get_CG_type()==HeavisideSphere) {
Mdouble wn2 = get_w2() - dot(tangential,tangential);
if ((wn2<=0) || (a*abs(a)>=wn2) || (b*abs(b)<=-wn2)) {
return 0;
} else {
Mdouble wn = sqrt(wn2);
//if the normal is parallel to the averaging direction
if (max(abs(a),abs(b))<1e-20) {
return get_CG_invvolume() * 2 * wn;
}
return get_CG_invvolume() / P1_P2_distance
*( ((b>= wn)?(constants::pi*wn2/2.0):( b*sqrt(wn2-sqr(b))+wn2*asin(b/wn)))
+((a<=-wn)?(constants::pi*wn2/2.0):(-a*sqrt(wn2-sqr(a))-wn2*asin(a/wn))));
}
} else if (get_CG_type()==Gaussian) { //Gaussian
if (dot(P1_P2_normal,P1_P2_normal)<1e-20) {
//cout << "!3";
//since we average parallel to the force line, the CG integral is shaped like the CG function
return get_CG_invvolume() * exp(-dot(P_P1,P_P1)/(2.0*get_w2()));
}
static Mdouble wsq2 = sqrt(2*get_w2());
static Mdouble f = sqrt(2*constants::pi*get_w2());
return get_CG_invvolume() * f * exp(-dot(tangential,tangential)/(2.0*get_w2()))
* (erf(b/wsq2)-erf(a/wsq2))/2/P1_P2_distance;
} else if (get_CG_type()==polynomial) {
double wn2 = get_w2() - dot(tangential,tangential);
if ((wn2<=0) | (a*abs(a)>=wn2) | (b*abs(b)<=-wn2)) {
return 0;
} else {
double wn = sqrt(wn2);
//if the normal is parallel to the averaging direction
if (max(abs(a),abs(b))<1e-20) return get_CG_invvolume() * 2 * wn;
double w = get_w();
return get_CG_invvolume()*evaluateIntegral(max(a,-wn)/w,min(b,wn)/w,tangential.GetLength()/w)*w / P1_P2_distance;
}
//CG_type_todo
} else { cerr << "error in CG_integral_2D" << endl; exit(-1); }
}
| Mdouble StatisticsPoint< T >::CG_integral_3D | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal, | ||
| Mdouble | P1_P2_distance | ||
| ) |
| Vec3D StatisticsPoint< T >::CG_integral_gradient | ( | Vec3D & | P1, |
| Vec3D & | P2, | ||
| Vec3D & | P1_P2_normal | ||
| ) |
gradient of phi
References Gaussian, constants::pi, and sqr.
{
Vec3D P_P1 = Position - P1;
Vec3D P_P2 = Position - P2;
Mdouble a = dot(P_P1,P1_P2_normal);
Mdouble b = dot(P_P2,P1_P2_normal);
Vec3D tangential = P_P1 - a * P1_P2_normal;
//CG_type_todo
if (get_CG_type()==Gaussian) {
Mdouble wsq2 = sqrt(2*get_w2());
Mdouble f = sqrt(2*constants::pi*get_w2());
return Vec3D(0.0,0.0,(exp(-sqr(a/wsq2))-exp(-sqr(b/wsq2)))/f/(P2.Z-P1.Z));
} else { cerr << "error in CG_integral_gradient" << endl; exit(-1); }
//~ if (get_CG_type()==Gaussian) return Vec3D(0.0,0.0,0.0);
//~ else { cerr << "error in CG_function" << endl; exit(-1); }
}
| Mdouble StatisticsPoint< T >::dot | ( | Vec3D & | P, |
| Vec3D & | Q | ||
| ) |
| double StatisticsPoint< O >::dot | ( | Vec3D & | , |
| Vec3D & | |||
| ) |
{return 0;}
| Mdouble StatisticsPoint< T >::evaluateIntegral | ( | Mdouble | n1, |
| Mdouble | n2, | ||
| Mdouble | t | ||
| ) | [inline] |
see StatisticsVector::evaluateIntegral
References StatisticsPoint< T >::gb.
{return gb->evaluateIntegral(n1,n2,t);}
| Mdouble StatisticsPoint< T >::evaluatePolynomial | ( | Mdouble | r | ) | [inline] |
see StatisticsVector::evaluatePolynomial
References StatisticsPoint< T >::gb.
{return gb->evaluatePolynomial(r);}
| Mdouble StatisticsPoint< T >::get_CG_invvolume | ( | ) | [inline] |
| CG StatisticsPoint< T >::get_CG_type | ( | ) | const [inline] |
see StatisticsVector::get_CG_type
References StatisticsPoint< T >::gb.
{return this->gb->get_CG_type();}
| Mdouble StatisticsPoint< T >::get_cutoff | ( | ) | [inline] |
see StatisticsVector::get_cutoff
References StatisticsPoint< T >::gb.
{return this->gb->get_cutoff();}
| Mdouble StatisticsPoint< T >::get_cutoff2 | ( | ) | [inline] |
see StatisticsVector::get_cutoff2
References StatisticsPoint< T >::gb.
{return this->gb->get_cutoff2();}
| Mdouble StatisticsPoint< T >::get_distance2 | ( | Vec3D & | P | ) |
| Mdouble StatisticsPoint< XY >::get_distance2 | ( | Vec3D & | P | ) |
| Mdouble StatisticsPoint< XZ >::get_distance2 | ( | Vec3D & | P | ) |
| Mdouble StatisticsPoint< YZ >::get_distance2 | ( | Vec3D & | P | ) |
| Mdouble StatisticsPoint< X >::get_distance2 | ( | Vec3D & | P | ) |
| Mdouble StatisticsPoint< Y >::get_distance2 | ( | Vec3D & | P | ) |
| Mdouble StatisticsPoint< Z >::get_distance2 | ( | Vec3D & | P | ) |
| double StatisticsPoint< O >::get_distance2 | ( | Vec3D & | ) |
{return 0;}
| void StatisticsPoint< T >::get_n | ( | int & | nx_, |
| int & | ny_, | ||
| int & | nz_ | ||
| ) | [inline] |
| Vec3D StatisticsPoint< T >::get_Position | ( | ) | const [inline] |
| Mdouble StatisticsPoint< T >::get_w | ( | ) | const [inline] |
| Mdouble StatisticsPoint< T >::get_w2 | ( | ) | const [inline] |
| Mdouble StatisticsPoint< T >::get_xmaxStat | ( | ) | [inline] |
see StatisticsVector::get_xmaxStat
References StatisticsPoint< T >::gb.
{return this->gb->get_xmaxStat();}
| Mdouble StatisticsPoint< T >::get_xminStat | ( | ) | [inline] |
see StatisticsVector::get_xminStat
References StatisticsPoint< T >::gb.
{return this->gb->get_xminStat();}
| Mdouble StatisticsPoint< T >::get_ymaxStat | ( | ) | [inline] |
see StatisticsVector::get_ymaxStat
References StatisticsPoint< T >::gb.
{return this->gb->get_ymaxStat();}
| Mdouble StatisticsPoint< T >::get_yminStat | ( | ) | [inline] |
see StatisticsVector::get_yminStat
References StatisticsPoint< T >::gb.
{return this->gb->get_yminStat();}
| Mdouble StatisticsPoint< T >::get_zmaxStat | ( | ) | [inline] |
see StatisticsVector::get_zmaxStat
References StatisticsPoint< T >::gb.
{return this->gb->get_zmaxStat();}
| Mdouble StatisticsPoint< T >::get_zminStat | ( | ) | [inline] |
see StatisticsVector::get_zminStat
References StatisticsPoint< T >::gb.
{return this->gb->get_zminStat();}
| StatisticsPoint< T > StatisticsPoint< T >::getSquared | ( | ) |
Squares all statistical variables; needed for variance.
References StatisticsPoint< T >::CollisionalHeatFlux, StatisticsPoint< T >::Density, StatisticsPoint< T >::Displacement, StatisticsPoint< T >::DisplacementMomentum, StatisticsPoint< T >::DisplacementMomentumFlux, StatisticsPoint< T >::Dissipation, StatisticsPoint< T >::EnergyFlux, StatisticsPoint< T >::Fabric, StatisticsPoint< T >::Momentum, StatisticsPoint< T >::MomentumFlux, StatisticsPoint< T >::NormalStress, StatisticsPoint< T >::NormalTraction, StatisticsPoint< T >::Nu, StatisticsPoint< T >::Potential, sqr, StatisticsPoint< T >::TangentialStress, and StatisticsPoint< T >::TangentialTraction.
{
StatisticsPoint<T> P;
P.Nu = sqr(Nu);
P.Density = sqr(Density);
P.Momentum = square(Momentum);
P.DisplacementMomentum = square(DisplacementMomentum);
P.Displacement = square(Displacement);
P.MomentumFlux = square(MomentumFlux);
P.DisplacementMomentumFlux = square(DisplacementMomentumFlux);
P.EnergyFlux = square(EnergyFlux);
P.NormalStress = square(NormalStress);
P.TangentialStress = square(TangentialStress);
P.NormalTraction = square(NormalTraction);
P.TangentialTraction = square(TangentialTraction);
P.Fabric = square(Fabric);
P.CollisionalHeatFlux = square(CollisionalHeatFlux);
P.Dissipation = sqr(Dissipation);
P.Potential = sqr(Potential);
return P;
}
| StatisticsPoint< T > & StatisticsPoint< T >::operator+= | ( | const StatisticsPoint< T > & | P | ) | [inline] |
Defines a plus operator needed to average values ( )
References StatisticsPoint< T >::CollisionalHeatFlux, StatisticsPoint< T >::Density, StatisticsPoint< T >::Displacement, StatisticsPoint< T >::DisplacementMomentum, StatisticsPoint< T >::DisplacementMomentumFlux, StatisticsPoint< T >::Dissipation, StatisticsPoint< T >::EnergyFlux, StatisticsPoint< T >::Fabric, StatisticsPoint< T >::Momentum, StatisticsPoint< T >::MomentumFlux, StatisticsPoint< T >::NormalStress, StatisticsPoint< T >::NormalTraction, StatisticsPoint< T >::Nu, StatisticsPoint< T >::Potential, StatisticsPoint< T >::TangentialStress, and StatisticsPoint< T >::TangentialTraction.
{
Nu += P.Nu;
Density += P.Density;
Momentum += P.Momentum;
DisplacementMomentum += P.DisplacementMomentum;
Displacement += P.Displacement;
MomentumFlux += P.MomentumFlux;
DisplacementMomentumFlux += P.DisplacementMomentumFlux;
EnergyFlux += P.EnergyFlux;
NormalStress += P.NormalStress;
TangentialStress += P.TangentialStress;
NormalTraction += P.NormalTraction;
TangentialTraction += P.TangentialTraction;
Fabric += P.Fabric;
CollisionalHeatFlux += P.CollisionalHeatFlux;
Dissipation += P.Dissipation;
Potential += P.Potential;
return *this;
}
| StatisticsPoint< T > & StatisticsPoint< T >::operator-= | ( | const StatisticsPoint< T > & | P | ) | [inline] |
Defines a plus operator needed to calculate variance.
References StatisticsPoint< T >::CollisionalHeatFlux, StatisticsPoint< T >::Density, StatisticsPoint< T >::Displacement, StatisticsPoint< T >::DisplacementMomentum, StatisticsPoint< T >::DisplacementMomentumFlux, StatisticsPoint< T >::Dissipation, StatisticsPoint< T >::EnergyFlux, StatisticsPoint< T >::Fabric, StatisticsPoint< T >::Momentum, StatisticsPoint< T >::MomentumFlux, StatisticsPoint< T >::NormalStress, StatisticsPoint< T >::NormalTraction, StatisticsPoint< T >::Nu, StatisticsPoint< T >::Potential, StatisticsPoint< T >::TangentialStress, and StatisticsPoint< T >::TangentialTraction.
{
Nu -= P.Nu;
Density -= P.Density;
Momentum -= P.Momentum;
DisplacementMomentum -= P.DisplacementMomentum;
Displacement -= P.Displacement;
MomentumFlux -= P.MomentumFlux;
DisplacementMomentumFlux -= P.DisplacementMomentumFlux;
EnergyFlux -= P.EnergyFlux;
NormalStress -= P.NormalStress;
TangentialStress -= P.TangentialStress;
NormalTraction -= P.NormalTraction;
TangentialTraction -= P.TangentialTraction;
Fabric -= P.Fabric;
CollisionalHeatFlux -= P.CollisionalHeatFlux;
Dissipation -= P.Dissipation;
Potential -= P.Potential;
return *this;
}
| StatisticsPoint< T > & StatisticsPoint< T >::operator/= | ( | const Mdouble | a | ) | [inline] |
Defines a division operator needed to average values ( )
{
Nu /= a;
Density /= a;
Momentum /= a;
DisplacementMomentum /= a;
Displacement /= a;
MomentumFlux /= a;
DisplacementMomentumFlux /= a;
EnergyFlux /= a;
NormalStress /= a;
TangentialStress /= a;
NormalTraction /= a;
TangentialTraction /= a;
Fabric /= a;
CollisionalHeatFlux /= a;
Dissipation /= a;
Potential /= a;
return *this;
}
| StatisticsPoint< T > & StatisticsPoint< T >::operator= | ( | const StatisticsPoint< T > & | P | ) | [inline] |
Defines a equal operator needed for copy constructor.
References StatisticsPoint< T >::CollisionalHeatFlux, StatisticsPoint< T >::Density, StatisticsPoint< T >::Displacement, StatisticsPoint< T >::DisplacementMomentum, StatisticsPoint< T >::DisplacementMomentumFlux, StatisticsPoint< T >::Dissipation, StatisticsPoint< T >::EnergyFlux, StatisticsPoint< T >::Fabric, StatisticsPoint< T >::Momentum, StatisticsPoint< T >::MomentumFlux, StatisticsPoint< T >::NormalStress, StatisticsPoint< T >::NormalTraction, StatisticsPoint< T >::Nu, StatisticsPoint< T >::Potential, StatisticsPoint< T >::TangentialStress, and StatisticsPoint< T >::TangentialTraction.
{
Nu = P.Nu;
Density = P.Density;
Momentum = P.Momentum;
DisplacementMomentum = P.DisplacementMomentum;
Displacement = P.Displacement;
MomentumFlux = P.MomentumFlux;
DisplacementMomentumFlux = P.DisplacementMomentumFlux;
EnergyFlux = P.EnergyFlux;
NormalStress = P.NormalStress;
TangentialStress = P.TangentialStress;
NormalTraction = P.NormalTraction;
TangentialTraction = P.TangentialTraction;
Fabric = P.Fabric;
CollisionalHeatFlux = P.CollisionalHeatFlux;
Dissipation = P.Dissipation;
Potential = P.Potential;
return *this;
}
| string StatisticsPoint< T >::print | ( | ) | const |
Outputs statistical variables in human-readable format.
Referenced by StatisticsVector< T >::write_time_average_statistics().
{
stringstream ss;
ss<< "Nu " << Nu
<<", Density " << Density
<< ",\n Momentum " << Momentum
<< ",\n DisplacementMomentum " << DisplacementMomentum
<< ",\n Displacement " << Displacement
<< ",\n MomentumFlux " << MomentumFlux
<< ",\n DisplacementMomentumFlux " << DisplacementMomentumFlux
<< ",\n EnergyFlux " << EnergyFlux
<< ",\n NormalStress " << NormalStress
<< ",\n TangentialStress " << TangentialStress
<< ",\n NormalTraction " << NormalTraction
<< ",\n TangentialTraction " << TangentialTraction
<< ",\n Fabric " << Fabric
<< ",\n CollisionalHeatFlux " << CollisionalHeatFlux
<< ",\n Dissipation " << Dissipation
<< ",\n Potential " << Potential;
return ss.str();
}
| string StatisticsPoint< T >::print_sqrt | ( | ) | const |
Outputs root of statistical variables in human-readable format.
{
stringstream ss;
ss<< "Nu " << sqrt(Nu)
<< ", Density " << sqrt(Density)
<< ", Momentum " << sqrt(Momentum)
<< ", DisplacementMomentum " << sqrt(DisplacementMomentum)
<< ", Displacement " << sqrt(Displacement)
<< ", MomentumFlux " << sqrt(MomentumFlux)
<< ", DisplacementMomentumFlux " << sqrt(DisplacementMomentumFlux)
<< ", EnergyFlux " << sqrt(EnergyFlux)
<< ", NormalStress " << sqrt(NormalStress)
<< ", TangentialStress " << sqrt(TangentialStress)
<< ", NormalTraction " << sqrt(NormalTraction)
<< ", TangentialTraction " << sqrt(TangentialTraction)
<< ", Fabric " << sqrt(Fabric)
<< ", CollisionalHeatFlux " << sqrt(CollisionalHeatFlux)
<< ", Dissipation " << sqrt(Dissipation)
<< ", Potential " << sqrt(Potential);
return ss.str();
}
| void StatisticsPoint< T >::set_CG_invvolume | ( | ) |
sets CG_invvolume
| void StatisticsPoint< XYZ >::set_CG_invvolume | ( | ) |
References Gaussian, HeavisideSphere, and polynomial.
{
if (get_CG_type()==HeavisideSphere) {
set_Heaviside_invvolume();
} else if (get_CG_type()==Gaussian) {
set_Gaussian_invvolume(gb->get_dim_particle());
} else if (get_CG_type()==polynomial) {
set_Polynomial_invvolume(3);
} else { cerr << "error in CG_function" << endl; exit(-1); }
//~ if (gb->get_boundedDomain()) {
//~ correct_dimension_for_bounded_domain(get_xmaxStat()-Position.X,Position.X-get_xminStat());
//~ correct_dimension_for_bounded_domain(get_ymaxStat()-Position.Y,Position.Y-get_yminStat());
//~ ///Should this be get_dim instead of get_dim_particle?
//~ if (gb->get_dim_particle()==3) correct_dimension_for_bounded_domain(get_zmaxStat()-Position.Z,Position.Z-get_zminStat());
//~ }
}
| void StatisticsPoint< XY >::set_CG_invvolume | ( | ) |
References Gaussian, HeavisideSphere, and polynomial.
{
if (get_CG_type()==HeavisideSphere) {
set_Heaviside_invvolume();
} else if (get_CG_type()==Gaussian) {
set_Gaussian_invvolume(2);
} else if (get_CG_type()==polynomial) {
set_Polynomial_invvolume(2);
} else { cerr << "error in set_CG_invvolume" << endl; exit(-1); }
if (gb->get_dim_particle()==3) CG_invvolume /= get_zmaxStat()-get_zminStat();
//~ if (gb->get_boundedDomain()) {
//~ correct_dimension_for_bounded_domain(get_xmaxStat()-Position.X,Position.X-get_xminStat());
//~ correct_dimension_for_bounded_domain(get_ymaxStat()-Position.Y,Position.Y-get_yminStat());
//~ }
}
| void StatisticsPoint< XZ >::set_CG_invvolume | ( | ) |
References Gaussian, HeavisideSphere, and polynomial.
{
if (get_CG_type()==HeavisideSphere) {
set_Heaviside_invvolume();
} else if (get_CG_type()==Gaussian) {
set_Gaussian_invvolume(gb->get_dim_particle()-1);
} else if (get_CG_type()==polynomial) {
set_Polynomial_invvolume(gb->get_dim_particle()-1);
} else { cerr << "error in set_CG_invvolume" << endl; exit(-1); }
CG_invvolume /= get_ymaxStat()-get_yminStat();
//~ if (gb->get_boundedDomain()) {
//~ correct_dimension_for_bounded_domain(get_xmaxStat()-Position.X,Position.X-get_xminStat());
//~ if (gb->get_dim_particle()==3) correct_dimension_for_bounded_domain(get_zmaxStat()-Position.Z,Position.Z-get_zminStat());
//~ }
}
| void StatisticsPoint< YZ >::set_CG_invvolume | ( | ) |
References Gaussian, HeavisideSphere, and polynomial.
{
if (get_CG_type()==HeavisideSphere) {
set_Heaviside_invvolume();
} else if (get_CG_type()==Gaussian) {
set_Gaussian_invvolume(gb->get_dim_particle()-1);
} else if (get_CG_type()==polynomial) {
set_Polynomial_invvolume(gb->get_dim_particle()-1);
} else { cerr << "error in set_CG_invvolume" << endl; exit(-1); }
CG_invvolume /= get_xmaxStat()-get_xminStat();
//~ if (gb->get_boundedDomain()) {
//~ correct_dimension_for_bounded_domain(get_ymaxStat()-Position.Y,Position.Y-get_yminStat());
//~ if (gb->get_dim_particle()==3) correct_dimension_for_bounded_domain(get_zmaxStat()-Position.Z,Position.Z-get_zminStat());
//~ }
}
| void StatisticsPoint< X >::set_CG_invvolume | ( | ) |
References Gaussian, HeavisideSphere, and polynomial.
{
if (get_CG_type()==HeavisideSphere) {
set_Heaviside_invvolume();
} else if (get_CG_type()==Gaussian) {
set_Gaussian_invvolume(1);
} else if (get_CG_type()==polynomial) {
set_Polynomial_invvolume(1);
} else { cerr << "error in set_CG_invvolume" << endl; exit(-1); }
CG_invvolume /= get_ymaxStat()-get_yminStat();
if (gb->get_dim_particle()==3) CG_invvolume /= get_zmaxStat()-get_zminStat();
//~ if (gb->get_boundedDomain()) {
//~ correct_dimension_for_bounded_domain(get_xmaxStat()-Position.X,Position.X-get_xminStat());
//~ }
}
| void StatisticsPoint< Y >::set_CG_invvolume | ( | ) |
References Gaussian, HeavisideSphere, and polynomial.
{
if (get_CG_type()==HeavisideSphere) {
set_Heaviside_invvolume();
} else if (get_CG_type()==Gaussian) {
set_Gaussian_invvolume(1);
} else if (get_CG_type()==polynomial) {
set_Polynomial_invvolume(1);
} else { cerr << "error in set_CG_invvolume" << endl; exit(-1); }
CG_invvolume /= get_xmaxStat()-get_xminStat();
if (gb->get_dim_particle()==3) CG_invvolume /= get_zmaxStat()-get_zminStat();
//~ if (gb->get_boundedDomain()) {
//~ correct_dimension_for_bounded_domain(get_ymaxStat()-Position.Y,Position.Y-get_yminStat());
//~ }
}
| void StatisticsPoint< Z >::set_CG_invvolume | ( | ) |
References Gaussian, HeavisideSphere, and polynomial.
{
if (get_CG_type()==HeavisideSphere) {
set_Heaviside_invvolume();
} else if (get_CG_type()==Gaussian) {
set_Gaussian_invvolume(gb->get_dim_particle()-2);
} else if (get_CG_type()==polynomial) {
set_Polynomial_invvolume(gb->get_dim_particle()-2);
} else { cerr << "error in set_CG_invvolume" << endl; exit(-1); }
CG_invvolume /= get_xmaxStat()-get_xminStat();
CG_invvolume /= get_ymaxStat()-get_yminStat();
//~ if (gb->get_boundedDomain()) {
//~ if (gb->get_dim_particle()==3) correct_dimension_for_bounded_domain(get_zmaxStat()-Position.Z,Position.Z-get_zminStat());
//~ }
}
| void StatisticsPoint< O >::set_CG_invvolume | ( | ) |
{
CG_invvolume = 1.0;
CG_invvolume /= get_xmaxStat()-get_xminStat();
CG_invvolume /= get_ymaxStat()-get_yminStat();
if (gb->get_dim_particle()==3) CG_invvolume /= get_zmaxStat()-get_zminStat();
}
| void StatisticsPoint< T >::set_CG_type | ( | const char * | CG_type | ) | [inline] |
see StatisticsVector::set_CG_type
References StatisticsPoint< T >::gb.
{this->gb->set_CG_type(CG_type);}
| void StatisticsPoint< T >::set_Gaussian_invvolume | ( | int | dim | ) |
sets CG_invvolume if CG_type=Gaussian
References cubic, constants::pi, and sqr.
{
//this is the prefactor 1/V of phi(r)=1/V*exp(-|r|^2/w^2)
CG_invvolume = 1/sqrt(2*constants::pi*get_w2());
//here we take into account the cutoff radius
CG_invvolume /= (erf(get_cutoff()/get_w()/sqrt(2)));
if (dim==3) CG_invvolume = cubic(CG_invvolume);
else if (dim==2) CG_invvolume = sqr(CG_invvolume);
else if (dim==0) CG_invvolume = 1.;
}
| static void StatisticsPoint< T >::set_gb | ( | StatisticsVector< T > * | new_gb | ) | [inline, static] |
see StatisticsVector::set_CG_type
References StatisticsPoint< T >::gb.
Referenced by StatisticsVector< T >::constructor().
{gb = new_gb;}
| void StatisticsPoint< T >::set_Heaviside_invvolume | ( | ) |
sets CG_invvolume if CG_type=HeaviSideSphere
References constants::pi.
{
CG_invvolume = 1.0/(4.0/3.0*constants::pi*sqrt(get_w2())*get_w2());
}
| void StatisticsPoint< T >::set_Polynomial_invvolume | ( | int | dim | ) |
sets CG_invvolume if CG_type=Polynomial
{
if (dim==3) CG_invvolume = 1.0/(sqrt(get_w2())*get_w2());
else if (dim==2) CG_invvolume = 1.0/get_w2();
else CG_invvolume = 1.0/sqrt(get_w2());
}
| void StatisticsPoint< T >::set_Position | ( | Vec3D | new_ | ) | [inline] |
| void StatisticsPoint< T >::set_w2 | ( | Mdouble | new_ | ) | [inline] |
| void StatisticsPoint< T >::set_zero | ( | ) |
Sets all statistical variables to zero.
Referenced by StatisticsVector< T >::average().
{
Nu = 0.0;
Density = 0.0;
Momentum.set_zero();
DisplacementMomentum.set_zero();
Displacement.set_zero();
MomentumFlux.set_zero();
DisplacementMomentumFlux.set_zero();
EnergyFlux.set_zero();
TangentialStress.set_zero();
NormalStress.set_zero();
TangentialStress.set_zero();
NormalTraction.set_zero();
TangentialTraction.set_zero();
Fabric.set_zero();
CollisionalHeatFlux.set_zero();
Dissipation = 0.0;
Potential = 0.0;
}
| void StatisticsPoint< T >::timeAverage | ( | const int | n | ) | [inline] |
Defines a division operator needed to time-average values (because the displacement does not have a value at the first timestep, this is slightly different than /=)
{
Nu /= n;
Density /= n;
Momentum /= n;
if (n==1) {
DisplacementMomentum.set_zero();
Displacement.set_zero();
DisplacementMomentumFlux.set_zero();
} else {
DisplacementMomentum /= n-1;
Displacement /= n-1;
DisplacementMomentumFlux /= n-1;
}
MomentumFlux /= n;
EnergyFlux /= n;
NormalStress /= n;
TangentialStress /= n;
NormalTraction /= n;
TangentialTraction /= n;
Fabric /= n;
CollisionalHeatFlux /= n;
Dissipation /= n;
Potential /= n;
//~ cout << "Timeavg" << "z=" << Position.Z << ", n=" << n << ", Mz=" << Momentum.Z << ", DMz" << DisplacementMomentum.Z << endl;
}
| string StatisticsPoint< T >::write | ( | ) | const |
Outputs statistical variables in computer-readable format.
{
stringstream ss;
ss.precision(16);
ss<< Nu
<< " " << Density
<< " " << Momentum
<< " " << DisplacementMomentum
<< " " << Displacement
<< " " << MomentumFlux
<< " " << DisplacementMomentumFlux
<< " " << EnergyFlux
<< " " << NormalStress
<< " " << TangentialStress
<< " " << NormalTraction
<< " " << TangentialTraction
<< " " << Fabric
<< " " << CollisionalHeatFlux
<< " " << Dissipation
<< " " << Potential;
return ss.str();
}
| string StatisticsPoint< T >::write_variable_names | ( | ) |
Outputs names of statistical variables in computer-readable format.
{
stringstream ss;
ss<< "Nu "
<< "Density "
<< "MomentumX "
<< "MomentumY "
<< "MomentumZ "
<< "DisplacementMomentumX "
<< "DisplacementMomentumY "
<< "DisplacementMomentumZ "
<< "DisplacementXX "
<< "DisplacementXY "
<< "DisplacementXZ "
<< "DisplacementYY "
<< "DisplacementYZ "
<< "DisplacementZZ "
<< "MomentumFluxXX "
<< "MomentumFluxXY "
<< "MomentumFluxXZ "
<< "MomentumFluxYY "
<< "MomentumFluxYZ "
<< "MomentumFluxZZ "
<< "DisplacementMomentumFluxXX "
<< "DisplacementMomentumFluxXY "
<< "DisplacementMomentumFluxXZ "
<< "DisplacementMomentumFluxYY "
<< "DisplacementMomentumFluxYZ "
<< "DisplacementMomentumFluxZZ "
<< "EnergyFluxX "
<< "EnergyFluxY "
<< "EnergyFluxZ "
<< "NormalStressXX "
<< "NormalStressXY "
<< "NormalStressXZ "
<< "NormalStressYX "
<< "NormalStressYY "
<< "NormalStressYZ "
<< "NormalStressZX "
<< "NormalStressZY "
<< "NormalStressZZ "
<< "TangentialStressXX "
<< "TangentialStressXY "
<< "TangentialStressXZ "
<< "TangentialStressYX "
<< "TangentialStressYY "
<< "TangentialStressYZ "
<< "TangentialStressZX "
<< "TangentialStressZY "
<< "TangentialStressZZ "
<< "NormalTractionX "
<< "NormalTractionY "
<< "NormalTractionZ "
<< "TangentialTractionX "
<< "TangentialTractionY "
<< "TangentialTractionZ "
<< "FabricXX "
<< "FabricXY "
<< "FabricXZ "
<< "FabricYY "
<< "FabricYZ "
<< "FabricZZ "
<< "CollisionalHeatFluxX "
<< "CollisionalHeatFluxY "
<< "CollisionalHeatFluxZ "
<< "Dissipation "
<< "Potential ";
return ss.str();
}
| std::ostream& operator | ( | std::ostream & | os, |
| const StatisticsPoint< T > & | stat | ||
| ) | [friend] |
Outputs statistical variables to ostream.
| Mdouble StatisticsPoint< T >::CG_invvolume |
Prefactor of CG function which depends on $w.
Referenced by StatisticsPoint< T >::get_CG_invvolume().
| Vec3D StatisticsPoint< T >::CollisionalHeatFlux |
Heat flux from collisions, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| Mdouble StatisticsPoint< T >::Density |
Density, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| MatrixSymmetric3D StatisticsPoint< T >::Displacement |
Linear displacement, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| Vec3D StatisticsPoint< T >::DisplacementMomentum |
Momentum from linear displacement, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| MatrixSymmetric3D StatisticsPoint< T >::DisplacementMomentumFlux |
Momentum flux from linear displacement, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| Mdouble StatisticsPoint< T >::Dissipation |
Dissipation form collisions, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| Vec3D StatisticsPoint< T >::EnergyFlux |
Energy flux, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| MatrixSymmetric3D StatisticsPoint< T >::Fabric |
Fabric tensor, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
StatisticsVector< T > * StatisticsPoint< T >::gb [static, private] |
Pointer to StatisticsVector (to obtain global parameters)
Referenced by StatisticsPoint< T >::evaluateIntegral(), StatisticsPoint< T >::evaluatePolynomial(), StatisticsPoint< T >::get_CG_type(), StatisticsPoint< T >::get_cutoff(), StatisticsPoint< T >::get_cutoff2(), StatisticsPoint< T >::get_n(), StatisticsPoint< T >::get_w(), StatisticsPoint< T >::get_w2(), StatisticsPoint< T >::get_xmaxStat(), StatisticsPoint< T >::get_xminStat(), StatisticsPoint< T >::get_ymaxStat(), StatisticsPoint< T >::get_yminStat(), StatisticsPoint< T >::get_zmaxStat(), StatisticsPoint< T >::get_zminStat(), StatisticsPoint< T >::set_CG_type(), StatisticsPoint< T >::set_gb(), and StatisticsPoint< T >::set_w2().
| int StatisticsPoint< T >::mirrorParticle |
indicates that a position is a (fake) particles used for periodic walls
Referenced by StatisticsPoint< T >::StatisticsPoint().
| Vec3D StatisticsPoint< T >::Momentum |
Momentum, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| MatrixSymmetric3D StatisticsPoint< T >::MomentumFlux |
Momentum flux, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| Matrix3D StatisticsPoint< T >::NormalStress |
Stress from normal forces, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| Vec3D StatisticsPoint< T >::NormalTraction |
Traction from normal forces, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| Mdouble StatisticsPoint< T >::Nu |
Particle volume fraction, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
Vec3D StatisticsPoint< T >::Position [private] |
Position at which evaluation occurs.
Referenced by StatisticsPoint< T >::get_Position(), StatisticsPoint< T >::set_Position(), and StatisticsPoint< T >::StatisticsPoint().
| Mdouble StatisticsPoint< T >::Potential |
Elastic energy .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| Matrix3D StatisticsPoint< T >::TangentialStress |
Stress from tangential forces, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
| Vec3D StatisticsPoint< T >::TangentialTraction |
Traction from tangential forces, .
Referenced by StatisticsPoint< T >::getSquared(), StatisticsPoint< T >::operator+=(), StatisticsPoint< T >::operator-=(), and StatisticsPoint< T >::operator=().
 1.7.6.1
1.7.6.1

