|
HG-MD
1
|
|
HG-MD
1
|
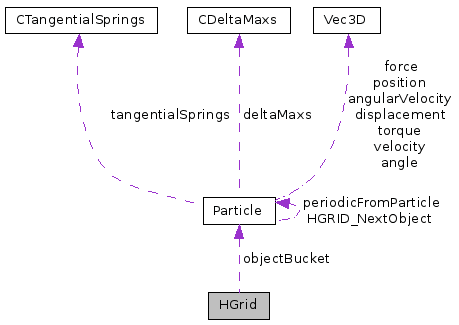
This is the HGRID class - This is the actually HGRID code. More...
#include <HGRID_base.h>
Public Member Functions | |
| HGrid () | |
| HGrid (int num_buckets, int hgrid_max_levels, Mdouble min_cell_size, Mdouble sphere_to_cell_ratio, Mdouble cell_to_cell_ratio) | |
| constructor: initializes parameters and allocates space for internal variables | |
| ~HGrid () | |
| constructor: initializes parameters and allocates space for internal variables | |
| void | Initialize_inv_size () |
| void | InsertParticleToHgrid (Particle *obj) |
| This insert a particle given by CParticle in to the HGrid (i.e. | |
| int | ComputeHashBucketIndex (Cell cellPos) |
| Computes hash bucket index in range [0, NUM_BUCKETS-1]. | |
| void | reset_num_buckets (int new_num_buckets) |
Public Attributes | |
| int | NUM_BUCKETS |
| outputs particle | |
| int | HGRID_MAX_LEVELS |
| Number of levels used in hgrid (1 equals linked cell algorithm) | |
| Mdouble | MIN_CELL_SIZE |
| Should be set to the DIAMETER of the smallest particle. | |
| Mdouble | SPHERE_TO_CELL_RATIO |
| Largest sphere in cell is SPHERE_TO_CELL_RATIO * cell size (=1 for particle contact forces, =2.5 for LJ-potential's) | |
| Mdouble | CELL_TO_CELL_RATIO |
| Cells at next level are CELL_TO_CELL_RATIO * size of current cell. | |
| int | occupiedLevelsMask |
| l-th bit of occupiedLevelsMask is 1 if level l is contains particles; initially zero (Implies max 32 hgrid levels) | |
| Particle ** | objectBucket |
| objectBucket[b] stores pointer to first element in hash bucket b; initially all NULL | |
| bool * | bucketIsChecked |
| bucketIsChecked[b] stores if hash bucket b is checked already; initially all zero | |
| Mdouble * | inv_size |
| minCellPos[l] stores ? of level l | |
This is the HGRID class - This is the actually HGRID code.
| HGrid::HGrid | ( | ) | [inline] |
References bucketIsChecked, inv_size, and objectBucket.
{
objectBucket = NULL;
bucketIsChecked = NULL;
//minCellPos = NULL;
//maxCellPos = NULL;
inv_size = NULL;
}
| HGrid::HGrid | ( | int | num_buckets, |
| int | hgrid_max_levels, | ||
| Mdouble | min_cell_size, | ||
| Mdouble | sphere_to_cell_ratio, | ||
| Mdouble | cell_to_cell_ratio | ||
| ) | [inline] |
constructor: initializes parameters and allocates space for internal variables
References bucketIsChecked, CELL_TO_CELL_RATIO, HGRID_MAX_LEVELS, inv_size, MIN_CELL_SIZE, NUM_BUCKETS, objectBucket, and SPHERE_TO_CELL_RATIO.
{
NUM_BUCKETS = num_buckets;
objectBucket = new Particle*[NUM_BUCKETS];
bucketIsChecked = new bool[NUM_BUCKETS];
HGRID_MAX_LEVELS = hgrid_max_levels;
//minCellPos = new Cell[HGRID_MAX_LEVELS];
//maxCellPos = new Cell[HGRID_MAX_LEVELS];
inv_size = new Mdouble[HGRID_MAX_LEVELS];
MIN_CELL_SIZE = min_cell_size;
SPHERE_TO_CELL_RATIO = sphere_to_cell_ratio;
CELL_TO_CELL_RATIO = cell_to_cell_ratio;
}
| HGrid::~HGrid | ( | ) | [inline] |
constructor: initializes parameters and allocates space for internal variables
References bucketIsChecked, inv_size, and objectBucket.
{
if (objectBucket) { delete [] objectBucket; objectBucket=NULL; }
if (bucketIsChecked) { delete [] bucketIsChecked; bucketIsChecked=NULL; }
//if (minCellPos) { delete [] minCellPos; minCellPos=NULL; }
//if (maxCellPos) { delete [] maxCellPos; maxCellPos=NULL; }
if (inv_size) { delete [] inv_size; inv_size=NULL; }
}
| int HGrid::ComputeHashBucketIndex | ( | Cell | cellPos | ) | [inline] |
Computes hash bucket index in range [0, NUM_BUCKETS-1].
References Cell::l, NUM_BUCKETS, Cell::x, Cell::y, and Cell::z.
Referenced by HGRID_2D::CheckCell(), HGRID_3D::CheckCell(), HGRID_2D::CheckCell_current(), HGRID_3D::CheckCell_current(), HGRID_2D::HGRID_RemoveParticleFromHgrid(), HGRID_3D::HGRID_RemoveParticleFromHgrid(), HGRID_2D::HGRID_UpdateParticleInHgrid(), HGRID_3D::HGRID_UpdateParticleInHgrid(), Chute::IsInsertable(), HGRID_2D::TestCell(), and HGRID_3D::TestCell().
{
const int h1 = 0x8da6b343; // Large multiplicative constants;
const int h2 = 0xd8163841; // here arbitrarily chosen primes
const int h3 = 0xcb1ab31f;
const int h4 = 0x165667b1;
int n = h1 * cellPos.x + h2 * cellPos.y + h3 * cellPos.z + h4 * cellPos.l;
n = n % NUM_BUCKETS;
if (n < 0) n += NUM_BUCKETS;
return n;
}
| void HGrid::Initialize_inv_size | ( | ) | [inline] |
References CELL_TO_CELL_RATIO, HGRID_MAX_LEVELS, inv_size, and MIN_CELL_SIZE.
Referenced by HGRID_base::InitBroadPhase().
{
Mdouble size = MIN_CELL_SIZE;
for (int level = 0; level<HGRID_MAX_LEVELS; level++)
{
// initialize inv_size
this->inv_size[level] = 1.0f/size;
size *= CELL_TO_CELL_RATIO;
}
}
| void HGrid::InsertParticleToHgrid | ( | Particle * | obj | ) | [inline] |
This insert a particle given by CParticle in to the HGrid (i.e.
it sets up the particle grid properts updates the level information on the grid)
References CELL_TO_CELL_RATIO, Particle::get_Radius(), HGRID_MAX_LEVELS, MIN_CELL_SIZE, occupiedLevelsMask, Particle::set_HGRID_Level(), and SPHERE_TO_CELL_RATIO.
Referenced by Chute::add_particle(), HGRID_base::HGRID_InsertParticleToHgrid(), and HGRID_base::InitBroadPhase().
{
// Find lowest level where object fully fits inside cell, taking RATIO into account
int level;
Mdouble size = MIN_CELL_SIZE;
Mdouble diameter = obj->get_Radius() * 2.0f;
for (level = 0; size < SPHERE_TO_CELL_RATIO*diameter; level++)
{
size *= CELL_TO_CELL_RATIO;
}
if (level >= HGRID_MAX_LEVELS)
{
cerr << "ATTENTION !!! Object is larger (d=" << diameter << ") than largest grid cell (" << size << ")!" << std::endl;
cerr << "Please lower minimum cell size (" << MIN_CELL_SIZE << ") for HGRID and rerun" << std::endl;
//cerr << "HGRID_MAX_LEVELS" << HGRID_MAX_LEVELS << "CELL_TO_CELL_RATIO" << CELL_TO_CELL_RATIO << endl;
exit(-1);
}
obj->set_HGRID_Level(level);
// indicate level is in use - not levels with no particles no collision detection is performed
this->occupiedLevelsMask |= (1 << level);
}
| void HGrid::reset_num_buckets | ( | int | new_num_buckets | ) | [inline] |
References bucketIsChecked, NUM_BUCKETS, and objectBucket.
{
NUM_BUCKETS=new_num_buckets;
objectBucket = (Particle**)realloc(objectBucket, NUM_BUCKETS*sizeof(Particle*));
bucketIsChecked = (bool*)realloc(bucketIsChecked, NUM_BUCKETS*sizeof(bool));
}
| bool* HGrid::bucketIsChecked |
bucketIsChecked[b] stores if hash bucket b is checked already; initially all zero
Referenced by HGRID_2D::CheckCell_current(), HGRID_3D::CheckCell_current(), HGrid(), HGRID_base::HGRID_actions_before_time_step(), HGRID_base::InitBroadPhase(), reset_num_buckets(), and ~HGrid().
Cells at next level are CELL_TO_CELL_RATIO * size of current cell.
Referenced by HGrid(), HGRID_base::HGRID_update_move(), Initialize_inv_size(), and InsertParticleToHgrid().
Number of levels used in hgrid (1 equals linked cell algorithm)
Referenced by HGRID_2D::CheckObjAgainstGrid(), HGRID_3D::CheckObjAgainstGrid(), HGrid(), Initialize_inv_size(), InsertParticleToHgrid(), HGRID_2D::TestObjAgainstGrid(), and HGRID_3D::TestObjAgainstGrid().
minCellPos[l] stores ? of level l
maxCellPos[l] stores ? of level l inv_size[l] stores inverse cell size of level l
Referenced by HGRID_2D::CheckObjAgainstGrid(), HGRID_3D::CheckObjAgainstGrid(), HGrid(), HGRID_2D::HGRID_UpdateParticleInHgrid(), HGRID_3D::HGRID_UpdateParticleInHgrid(), Initialize_inv_size(), HGRID_2D::TestObjAgainstGrid(), HGRID_3D::TestObjAgainstGrid(), and ~HGrid().
Should be set to the DIAMETER of the smallest particle.
Referenced by HGrid(), HGRID_base::HGRID_update_move(), Initialize_inv_size(), and InsertParticleToHgrid().
outputs particle
Number of buckets used for hashing
Referenced by ComputeHashBucketIndex(), HGrid(), HGRID_base::HGRID_actions_before_time_step(), HGRID_base::InitBroadPhase(), and reset_num_buckets().
objectBucket[b] stores pointer to first element in hash bucket b; initially all NULL
Referenced by HGRID_2D::CheckCell(), HGRID_3D::CheckCell(), HGRID_2D::CheckCell_current(), HGRID_3D::CheckCell_current(), HGrid(), HGRID_base::HGRID_actions_before_time_step(), HGRID_2D::HGRID_RemoveParticleFromHgrid(), HGRID_3D::HGRID_RemoveParticleFromHgrid(), HGRID_2D::HGRID_UpdateParticleInHgrid(), HGRID_3D::HGRID_UpdateParticleInHgrid(), HGRID_base::InitBroadPhase(), Chute::IsInsertable(), reset_num_buckets(), HGRID_2D::TestCell(), HGRID_3D::TestCell(), and ~HGrid().
l-th bit of occupiedLevelsMask is 1 if level l is contains particles; initially zero (Implies max 32 hgrid levels)
Referenced by HGRID_2D::CheckObjAgainstGrid(), HGRID_3D::CheckObjAgainstGrid(), HGRID_base::InitBroadPhase(), InsertParticleToHgrid(), HGRID_2D::TestObjAgainstGrid(), and HGRID_3D::TestObjAgainstGrid().
Largest sphere in cell is SPHERE_TO_CELL_RATIO * cell size (=1 for particle contact forces, =2.5 for LJ-potential's)
Referenced by HGrid(), and InsertParticleToHgrid().
 1.7.6.1
1.7.6.1

